




ระบบวัดทัศนคติ




คุณสมบัติของสินค้า
MS-100A0 เป็นทัศนคติอิสระสามระดับที่ใช้เทคโนโลยีไมโครแมคคานิค (MEMS)
ระบบการวัด ไจโรสโคป MEMS ประสิทธิภาพสูงในตัวและมาตรวัดความเร่ง MEMS ผ่านอัลกอริธึมการกรองที่คำนวณมุมพิทช์ มุมม้วน และมุมหันของพาหะตามเวลาจริงนอกจากนี้ยังเลือกจับคู่กับแมกนีโตมิเตอร์เพื่อให้ได้การค้นหาทิศเหนือที่มีความแม่นยำสูง และใช้เอาต์พุตความเร็วเชิงมุม 3 แกนและความเร่ง 3 แกนสำหรับการควบคุมการเคลื่อนที่
ลักษณะผลิตภัณฑ์
- ความแม่นยำทัศนคติดีกว่า 0.1°
- ช่วงการวัดทัศนคติ ±90°
- ช่วงอุณหภูมิในการทำงาน: -40~65℃
- สภาพแวดล้อมการสั่นสะเทือน: 10~2000Hz, 6g (RMS)
- ประเภทอินเทอร์เฟซที่หลากหลาย รองรับ RS232, RS422, CAN และอินเทอร์เฟซมาตรฐานอื่นๆ
- การออกแบบซีลกันน้ำ
ลักษณะไฟฟ้า
- แหล่งจ่ายไฟ: 5V (ทั่วไป), อินพุตแรงดันไฟฟ้ากว้างที่ปรับแต่งได้ 12~36V
- กำลังไฟ: 0.5W (สูงสุด)
- ระลอกคลื่น: 100mV (พีคทูพีค)
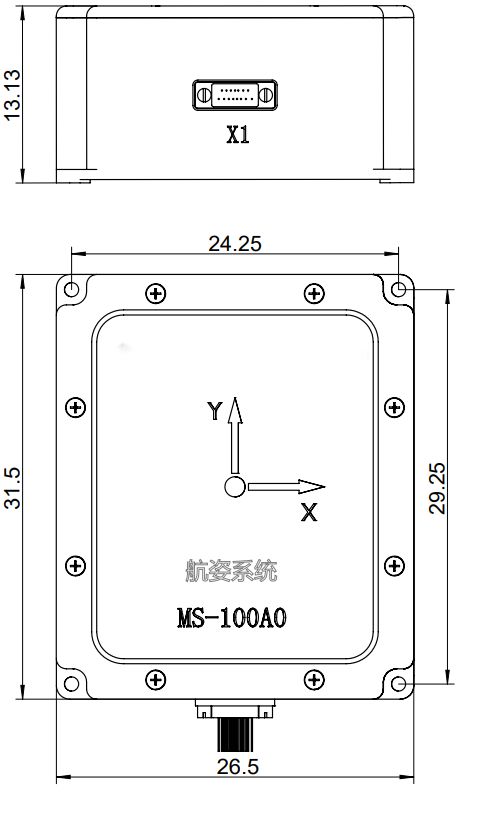
มิติทางกล
ตัวชี้วัดทางเทคนิค
| ไจโรพารามิเตอร์ | ||||
| พารามิเตอร์ |
เงื่อนไขการทดสอบ | ค่าทั่วไป |
ค่าสูงสุด | หน่วย |
| ช่วงการวัดแบบไดนามิก |
|
| 450 | º/วินาที |
| ความเสถียรของอคติเป็นศูนย์ | ความแปรปรวนของอัลลัน แกน Z | 0.8 |
| º/ชม |
| ความแปรปรวนของอัลลัน แกน X และแกน Y | 1.6 |
| º/ชม | |
| ค่าเฉลี่ย 10 วินาที, แกน X, Y (-40℃~+80℃, อุณหภูมิคงที่) | 6 |
| º/ชม | |
| ค่าเฉลี่ย 1 วินาที, แกน X, Y (-40℃~+80℃, อุณหภูมิคงที่) | 9 |
| º/ชม | |
| ออฟเซ็ตศูนย์ | ช่วงออฟเซ็ตเป็นศูนย์ | ±0.2 |
| º/วินาที |
| การเปลี่ยนอคติเป็นศูนย์ตลอดช่วงอุณหภูมิทั้งหมด | ±0.06 |
| º/วินาที | |
| เริ่มต้นเพื่อเริ่มต้นการทำซ้ำ | 0.006 |
| º/วินาที | |
| เริ่มทำซ้ำวันต่อวัน | 0.009 |
| º/วินาที | |
| อิทธิพลของการเร่งความเร็วเชิงเส้นต่อ Zero Bias | 0.002 |
| º/วินาที | |
| อิทธิพลของการสั่นต่อการชดเชยศูนย์ การเปลี่ยนแปลงก่อนและหลังการสั่น | 0.002 |
| º/วินาที | |
| อิทธิพลของการสั่นสะเทือนต่อการชดเชยศูนย์ การเปลี่ยนแปลงก่อนการสั่นสะเทือน | 0.002 |
| º/วินาที | |
| สเกลแฟกเตอร์ | ความแม่นยำของตัวประกอบสเกล แกน Z | 0.3 |
| % |
| ความแม่นยำของตัวประกอบสเกล แกน X, Y | 0.6 |
| % | |
| สเกลแฟกเตอร์ไม่เป็นเชิงเส้น แกน Z | 0.01 |
| %FS | |
| สเกลแฟกเตอร์ไม่เป็นเชิงเส้น แกน X, Y | 0.02 |
| %FS | |
| เดินสุ่มมุม |
| 0.001 |
| °/√ชม |
|
ความหนาแน่นของเสียง |
| 0.001 |
| °/วินาที/√ชม |
| ปณิธาน |
| 3.052×10−7 |
| º/s/LSB |
| แบนด์วิธ |
| 200 |
| Hz |
| พารามิเตอร์มาตรความเร่ง | ||||
| พารามิเตอร์ |
เงื่อนไขการทดสอบ |
ค่าทั่วไป | ค่าสูงสุด | หน่วย |
| ช่วงการวัดแบบไดนามิก |
| 16 |
| g |
| ความเสถียรของอคติเป็นศูนย์ | ความแปรปรวนของอัลลัน | 0.03 |
| mg |
| เฉลี่ย 10 วินาที (-40℃~+80℃, อุณหภูมิคงที่) | 0.2 |
| mg | |
| เฉลี่ย 1 วินาที (-40℃~+80℃, อุณหภูมิคงที่) | 0..3 |
| mg | |
| ออฟเซ็ตศูนย์ | ช่วงออฟเซ็ตเป็นศูนย์ | 5 |
| mg |
|
ความแปรผันของการชดเชยเป็นศูนย์ (ค่าสูงสุดถึงค่าสูงสุด) ในช่วงอุณหภูมิทั้งหมด | 5 |
| mg | |
| เริ่มต้นเพื่อเริ่มต้นการทำซ้ำ | 0.5 |
| mg | |
| เริ่มทำซ้ำวันต่อวัน | 0.8 |
| mg | |
| ค่าสัมประสิทธิ์อุณหภูมิอคติเป็นศูนย์ | 0.05 | 0.1 | มก./℃ | |
| สเกลแฟกเตอร์ | ความแม่นยำของตัวประกอบสเกล | 0.5 |
| % |
| สเกลแฟกเตอร์ไม่เป็นเชิงเส้น | 0.1 |
| %FS | |
| เดินสุ่มความเร็ว |
| 0.029 |
| ม./วินาที/√ชม |
| ความหนาแน่นของเสียง |
| 0.025 |
| มก./√Hz |
| ปณิธาน |
| 1.221×10−8 |
| g/LSB |
| แบนด์วิธ |
| 200 |
| Hz |
| พารามิเตอร์ Magnetometer (ตัวเลือก) | ||||
| พารามิเตอร์ | เงื่อนไขการทดสอบ |
ค่าทั่วไป | ค่าสูงสุด |
หน่วย |
| ช่วงการวัดแบบไดนามิก |
| 2.5 |
| เกาส์ |
| ออฟเซ็ตศูนย์ | สภาพแวดล้อมที่ไม่ใช่แม่เหล็ก | 15 |
| มาก |
| ความแม่นยำของหัวเรื่อง | ||||
| ความแม่นยำของหัวเรื่องแม่เหล็ก |
| 0.5 |
| ° |
| ความแม่นยำของทัศนคติในแนวนอน | ||||
|
ความแม่นยำของมุมเอียง |
| 0.1 |
| ° |
| ความแม่นยำของมุมม้วน |
| 0.1 |
| ° |
| ไจโรพารามิเตอร์ | ||||
| พารามิเตอร์ |
เงื่อนไขการทดสอบ | ค่าทั่วไป |
ค่าสูงสุด | หน่วย |
| ช่วงการวัดแบบไดนามิก |
|
| 450 | º/วินาที |
| ความเสถียรของอคติเป็นศูนย์ | ความแปรปรวนของอัลลัน แกน Z | 0.8 |
| º/ชม |
| ความแปรปรวนของอัลลัน แกน X และแกน Y | 1.6 |
| º/ชม | |
| ค่าเฉลี่ย 10 วินาที, แกน X, Y (-40℃~+80℃, อุณหภูมิคงที่) | 6 |
| º/ชม | |
| ค่าเฉลี่ย 1 วินาที, แกน X, Y (-40℃~+80℃, อุณหภูมิคงที่) | 9 |
| º/ชม | |
| ออฟเซ็ตศูนย์ | ช่วงออฟเซ็ตเป็นศูนย์ | ±0.2 |
| º/วินาที |
| การเปลี่ยนอคติเป็นศูนย์ตลอดช่วงอุณหภูมิทั้งหมด | ±0.06 |
| º/วินาที | |
| เริ่มต้นเพื่อเริ่มต้นการทำซ้ำ | 0.006 |
| º/วินาที | |
| เริ่มทำซ้ำวันต่อวัน | 0.009 |
| º/วินาที | |
| อิทธิพลของการเร่งความเร็วเชิงเส้นต่อ Zero Bias | 0.002 |
| º/วินาที | |
| อิทธิพลของการสั่นต่อการชดเชยศูนย์ การเปลี่ยนแปลงก่อนและหลังการสั่น | 0.002 |
| º/วินาที | |
| อิทธิพลของการสั่นสะเทือนต่อการชดเชยศูนย์ การเปลี่ยนแปลงก่อนการสั่นสะเทือน | 0.002 |
| º/วินาที | |
| สเกลแฟกเตอร์ | ความแม่นยำของตัวประกอบสเกล แกน Z | 0.3 |
| % |
| ความแม่นยำของตัวประกอบสเกล แกน X, Y | 0.6 |
| % | |
| สเกลแฟกเตอร์ไม่เป็นเชิงเส้น แกน Z | 0.01 |
| %FS | |
| สเกลแฟกเตอร์ไม่เป็นเชิงเส้น แกน X, Y | 0.02 |
| %FS | |
| เดินสุ่มมุม |
| 0.001 |
| °/√ชม |
|
ความหนาแน่นของเสียง |
| 0.001 |
| °/วินาที/√ชม |
| ปณิธาน |
| 3.052×10−7 |
| º/s/LSB |
| แบนด์วิธ |
| 200 |
| Hz |
| พารามิเตอร์มาตรความเร่ง | ||||
| พารามิเตอร์ |
เงื่อนไขการทดสอบ |
ค่าทั่วไป | ค่าสูงสุด | หน่วย |
| ช่วงการวัดแบบไดนามิก |
| 16 |
| g |
| ความเสถียรของอคติเป็นศูนย์ | ความแปรปรวนของอัลลัน | 0.03 |
| mg |
| เฉลี่ย 10 วินาที (-40℃~+80℃, อุณหภูมิคงที่) | 0.2 |
| mg | |
| เฉลี่ย 1 วินาที (-40℃~+80℃, อุณหภูมิคงที่) | 0..3 |
| mg | |
| ออฟเซ็ตศูนย์ | ช่วงออฟเซ็ตเป็นศูนย์ | 5 |
| mg |
|
ความแปรผันของการชดเชยเป็นศูนย์ (ค่าสูงสุดถึงค่าสูงสุด) ในช่วงอุณหภูมิทั้งหมด | 5 |
| mg | |
| เริ่มต้นเพื่อเริ่มต้นการทำซ้ำ | 0.5 |
| mg | |
| เริ่มทำซ้ำวันต่อวัน | 0.8 |
| mg | |
| ค่าสัมประสิทธิ์อุณหภูมิอคติเป็นศูนย์ | 0.05 | 0.1 | มก./℃ | |
| สเกลแฟกเตอร์ | ความแม่นยำของตัวประกอบสเกล | 0.5 |
| % |
| สเกลแฟกเตอร์ไม่เป็นเชิงเส้น | 0.1 |
| %FS | |
| เดินสุ่มความเร็ว |
| 0.029 |
| ม./วินาที/√ชม |
| ความหนาแน่นของเสียง |
| 0.025 |
| มก./√Hz |
| ปณิธาน |
| 1.221×10−8 |
| g/LSB |
| แบนด์วิธ |
| 200 |
| Hz |
| พารามิเตอร์ Magnetometer (ตัวเลือก) | ||||
| พารามิเตอร์ | เงื่อนไขการทดสอบ |
ค่าทั่วไป | ค่าสูงสุด |
หน่วย |
| ช่วงการวัดแบบไดนามิก |
| 2.5 |
| เกาส์ |
| ออฟเซ็ตศูนย์ | สภาพแวดล้อมที่ไม่ใช่แม่เหล็ก | 15 |
| มาก |
| ความแม่นยำของหัวเรื่อง | ||||
| ความแม่นยำของหัวเรื่องแม่เหล็ก |
| 0.5 |
| ° |
| ความแม่นยำของทัศนคติในแนวนอน | ||||
|
ความแม่นยำของมุมเอียง |
| 0.1 |
| ° |
| ความแม่นยำของมุมม้วน |
| 0.1 |
| ° |


